C-SLAM
C-SLAM
| |
| Short Description: | Development of a Cognitive SLAM system |
| Coordinator: | AndreaBonarini (andrea.bonarini@polimi.it) |
| Tutor: | AndreaBonarini (andrea.bonarini@polimi.it) |
| Collaborator: | |
| Students: | DavideTateo (davide.tateo@polimi.it) |
| Research Area: | Robotics |
| Research Topic: | Robot development |
| Start: | 2013/04/12 |
| End: | 2014/10/31 |
| Status: | Closed |
| Level: | Ms |
| Type: | Thesis |
The Aim of this project is to build a Cognitive SLAM system.
The main idea is to extract high level features, like objects in the image and use them to localize an autonomous robot.
Source code can be found here. The thesis can be found in politesi.
Logical Structure

The reasoner is the fundamental part of the system. The reasoner implements a fuzzy tree classification, similar to fuzzy decision trees.
Object detection is done on the whole image, while object recognition is done only on detected objects.
The tracking algorithm used is a long term tracking algorithm. We use a C++ implementation of the CMT algorithm.
Localization is done using sensor fusion algorithm, based on maximum likelihood estimation on a factor graph.
System Architecture
The system is developed using the ROS middleware.
The sensor fusion algorithm used to implement localization is developed using the ROAMFREE library.
Parser for the knowledge base languages are developed using Flex and Bison.
Vision algorithms are based on OpenCV2.

Experimental Results

Detection algorithm output
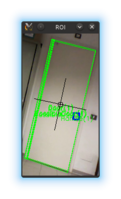
Recognition of a door
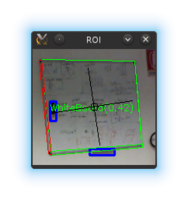
Recognition of a Whiteboard

Tracking some objects
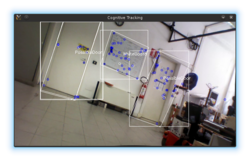
Same objects from another viewpoint


