Difference between revisions of "ZOIDBERG - An autonomous bio-inspired Robotic fish"
(→Preliminary part design) |
(→Preliminary part design) |
||
| Line 58: | Line 58: | ||
=== Preliminary part design === | === Preliminary part design === | ||
| − | + | <gallery> | |
| − | + | Image:Test_forma_1.png|First test body shape | |
| − | + | Image:Test_propulsion.png|thumb|300 px|Propulsion test | |
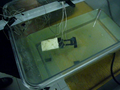
| − | + | Image:Test_PLUS.jpg|thumb|300 px|Developed test body | |
| − | + | Image:Schema_1.png|thumb|300 px|Schematic of the first board | |
| − | + | Image:Schema_2.png|thumb|300 px|Schematic of the second board | |
| − | + | Image:Test_circuit.jpg|thumb|300 px|Test circuit | |
| + | </gallery> | ||
Revision as of 18:36, 17 May 2008
Part 1: project profile
Project name
ZOIDBERG - An autonomous bio-inspired robotic fish
Project short description
ZOIDBERG is a project about an autonomous bio-inspired RoboFish. The project's aim is to realize a bio-inspired fish actuated by a particular electroactive polymer (EAP) , ICPF (Ionic Conducting Polymer Film). The robot will be able to swim in autonomous way in response to different behaviours.
People involved
Project head
Prof.ssa Giuseppina Gini - User:GiuseppinaGini
Other Politecnico di Milano people
Ing. Paolo Belluco - User:PaoloBelluco
Students currently working on the project
Francesco Milli - User:FrancescoMilli
Maurizio Mercurio - User:MaurizioMercurio
Alessandro Nava - User:AlessandroNava
Laboratory work and risk analysis
Laboratory work for this project will be mainly performed at AIRLab/Lambrate. It will include significant amounts of mechanical work as well as of electrical and electronic activity. Potentially risky activities are the following:
- Use of mechanical tools. Standard safety measures described in Safety norms will be followed.
- Use of soldering iron. Standard safety measures described in Safety norms will be followed.
- Use of high-voltage circuits. Special gloves and a current limiter will be used.
- Robot testing. Standard safety measures described in Safety norms will be followed.
Part 2: project description
The project is composed by:
- state of the art;
- preliminary studies and sketches;
- design notes and guidelines;
- description and results of experiments;
- useful internet links: Dr. Zoidberg
State of the art
Our Nafion EAP experiments on YouTube
Preliminary part design
First test body shape
thumb|300 px|Propulsion test

thumb|300 px|Developed test body

thumb|300 px|Schematic of the first board
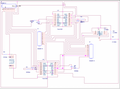
thumb|300 px|Schematic of the second board

thumb|300 px|Test circuit





