ZOIDBERG - An autonomous bio-inspired Robotic fish
Part 1: project profile
Project name
ZOIDBERG - An autonomous bio-inspired robotic fish
Project short description
ZOIDBERG is a project about an autonomous bio-inspired RoboFish. The project's aim is to realize a bio-inspired fish actuated by a particular electroactive polymer (EAP) , ICPF (Ionic Conducting Polymer Film). The robot will be able to swim in autonomous way in response to different behaviours.
People involved
Project head
Prof.ssa Giuseppina Gini - User:GiuseppinaGini
Other Politecnico di Milano people
Ing. Paolo Belluco - User:PaoloBelluco
Students currently working on the project
Francesco Milli - User:FrancescoMilli
Maurizio Mercurio - User:MaurizioMercurio
Alessandro Nava - User:AlessandroNava
Laboratory work and risk analysis
Laboratory work for this project will be mainly performed at AIRLab/Lambrate. It will include significant amounts of mechanical work as well as of electrical and electronic activity. Potentially risky activities are the following:
- Use of mechanical tools. Standard safety measures described in Safety norms will be followed.
- Use of soldering iron. Standard safety measures described in Safety norms will be followed.
- Use of high-voltage circuits. Special gloves and a current limiter will be used.
- Robot testing. Standard safety measures described in Safety norms will be followed.
Part 2: project description
The project is composed by:
- state of the art;
- preliminary studies and sketches;
- design notes and guidelines;
- description and results of experiments;
- useful internet links: Dr. Zoidberg
State of the art
Our Nafion EAP experiments on YouTube
Preliminary part design
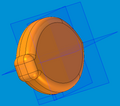
First test body shape
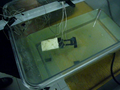
Propulsion test

Developed test body

Schematic of the first board
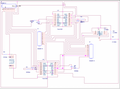
Schematic of the second board

Test circuit





