Zoidberg II, powering robot fish
Part 1: project profile
Project name
Zoidberg II, powering robot fish
Project short description
This project is aimed at designing, constructing and improving autonomous robot fish, starting from the ZOIDBERG project. It will be able to swim deeply in the water, to communicate and to orient in a free space thanks to several sensors mounted on-board.
Dates
Start date: 2008/11/01
End date: 2009/12/23
People involved
Project head(s)
Prof. Gini Giuseppina - User:GiuseppinaGini
Other Politecnico di Milano people
Ing. Paolo Belluco - User:PaoloBelluco
Students currently working on the project
Andrea Parolina - User:AndreaParolina
Dario Simontacchi - User:DarioSimontacchi
Marco Perri - User:MarcoPerri
Students who worked on the project in the past
Francesco Milli - User:FrancescoMilli
Maurizio Mercurio - User:MaurizioMercurio
Alessandro Nava - User:AlessandroNava
Laboratory work and risk analysis
Laboratory work for this project will be mainly performed at AIRLab/Lambrate. It will include significant amounts of mechanical work as well as of electrical and electronic activity. Potentially risky activities are the following:
Use of mechanical tools. Standard safety measures described in Safety norms will be followed. Use of soldering iron. Standard safety measures described in Safety norms will be followed. Use of high-voltage circuits. Special gloves and a current limiter will be used. Robot testing. Standard safety measures described in Safety norms will be followed.
Part 2: project description
The project is composed by:
- State of the art;
- Preliminary studies and sketches;
- Design notes and guidelines;
- Description and results of experiments;
State of the art
The work that mostly influenced the design of our robot is a lower-scale automaton realized by Z. Wang, G. Hang, J. Li, Y. Wang and K. Xiao, which is actuated with the same type of SMA that we used.
It is discussed in: A micro-robot fish with embedded SMA wire actuated flexible biomimetic fin
Preliminary part design
Mechanical structure
The design of the body has evolved into the current shape through many development steps, in response to the varying specifications of the on-board electronics, to changes in the manufacturing process of the hull, and for a better approach to the hydrostatic balance problem.
The first image below represents the model designed with CATIA software; it's shown inside the position and the shape of every component used. In the second there is the prototype realized with the high density polyurethane; it represents the left and the right part of the robot fish disposed on horizontal plane. In the last image we can see the external skin in plastic, made with the thermoshaping technic.
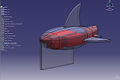
CATIA model

Prototype in polyurethane

External skin in plastic



In next images there are tools and machinery that we used to realize the structure of the robot fish.

Thermoshaping machine

Milling cutter


Electronics
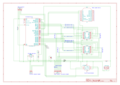
The first version of the on-board electronics was a two-boards arrangement. Due to problems and delays with the company responsible of the manufacturing of said boards, there are no working exemplars of this solution. In the meantime the circuit has been redesigned and simplified to fit a single board, and we put together a very simple intermittent circuit to carry the first autonomous tests (without the robot being tethered to the tank).
Below are shown, in order: the original schematics of the two boards, the schematic of the oscillator used for the first tests, based on a 555 chip, and the intermittent circuit assembled on a prototype board.

Main Board

Power Board

Pressure Board

Proximity Board

Actuator Board

Test circuit






Videos of the actuator tests
Here are some clips, filmed during the first experiments trying to have a working actuator. The polymer and the electrodes are held in place by rough adhesive, and the power is supplied by an external generator. we are manually changing the polarity of the current going through the actuator.
Final design
(todo)
Final review board schematic

The hull open, exposing the wiring

Internal arrangement of the structure




Complete robot, top view

Complete robot, side view


Tests and results
(todo)