This Research Topic belongs to the area Robotics
SLAM, "Simultaneous Localization And Mapping", is one of the most importan problems in robotics. The problem is to localize a robot in a unknown envirorment, while generating a map of the envirorment.
The SLAM problem is more complex than the localization problem, because the localization assumes a known map. Also is more complex than the mapping problem, because in this scenario robot poses are assumed to be known.
Project proposals
Wiki Page: Cognitive SLAM 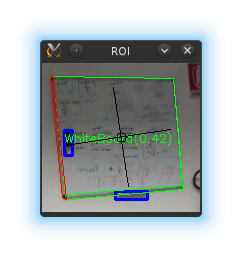
Title: Cognitive SLAM
Description: We have developed a system that is able to detect, recognize and track objects in an image taken from a low cost robot equipped with a IMU and a low cost camera. The system is capable to detect and recognize objects using a user defined fuzzy tree classifier. However the system performance is heavily dependent on high level feature extraction, such as geometric features. The problem is non trivial due to noisy low cost camera and changes in the light conditions. The aim of this project is to improve the feature extraction and description process, both in performance and quality, possible adding a more complete description or others type of features. The long term aim of the research is to have an autonomuos robot capable to create a semantic map of the envirorment, localize himself , make inference on the map, navigate into the envirorment using the objects as landmarks.
No special skills are required, except basic c and object oriented programming.
Tutor: AndreaBonarini, DavideTateo
Additional Info: CFU 5 - 20 / Master of Science / Course, Thesis
|
